English
English Hindi
Hindi
यूएवी के आईएनएस/जीपीएस फ्यूशन के लिए ईकेएफ आधारित एल्गोरिथम
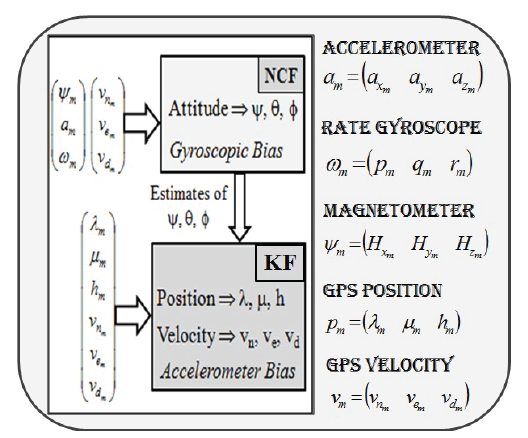
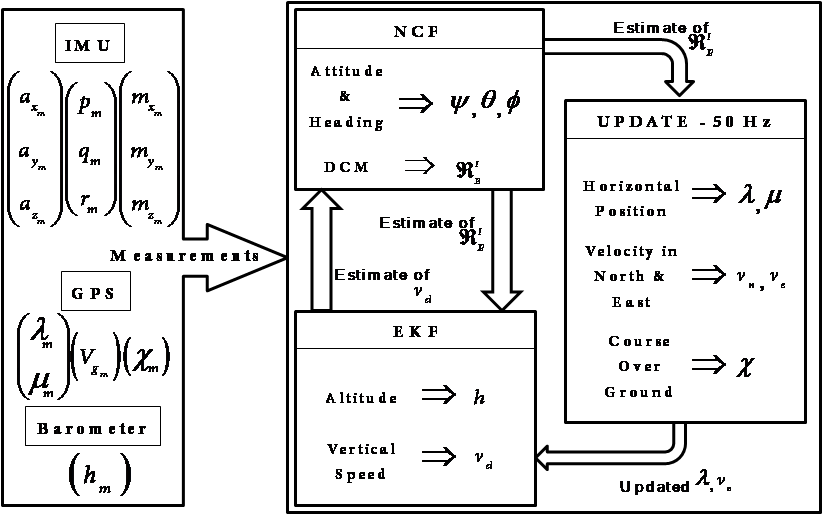
ईकेएफ अभिकल्प का उद्देश्य है एक विमान की स्थिति, वेग, प्रवृत्ति और हेडिंग को आंकना। हालांकि, किसी विमान की प्रवृत्ति और हेडिंग का आकलन आम तौर पर एएचआरएस के निरूपण के माध्यम से किया जाता है, स्थिति का आकलन किया जाता है, एक विमान के प्रवृत्ति और हेडिंग के साथ गति को आईएनएस निरूपण के तहत परंपरागत रूप से अध्ययन किया जाता है। यह दृष्टिकोण ईकेएफ एल्गोरिथम की सहायता के लिए बाह्य संदर्भ के रूप में ऑनबोर्ड त्रि-अक्षीय त्वरण्मापी, त्रि-अक्षीय रेट गइरोस्कोप और त्रि-अक्षीय मैग्नेटमीटर और जीपीएस मापन का प्रयोग करता है। ईकेएफ का अभिकल्प नौ, बारह, पंद्रह स्थिति और विभाजित आर्किटेक्चर ईकेएफ पर प्रयोग किया गया। विभाजित आर्किटेक्चर में प्रत्येक मॉडल की निगरानी सुनिश्चित की जाती है जिससे यह सुनिश्चित किया जा सके कि आर्किटेक्चर के माध्यम से सभी 15 स्थितियों को देखा जा सके। एक 15-स्थिति विस्तारित कल्मन फिल्टर (ईकेएफ) और विभाजित आर्किटेक्चर छह नॉनलाइन काम्प्लिमेंटरी फिल्टर (एनसीएफ) और नौ- स्थिति ईकेएफ के साथ एक विभाजित आर्किटेक्चर की जांच विस्तार से किया गया है। ये दोनों फ्यूशन आर्किटेक्चर जीपीएस और इनरशियल मापन यूनिट में तीन अक्षीय त्वरणमापी, तीन अक्षीय रेट गायरोस और तीन अक्षीय मैगनेटोमीटर ओपन लूप फैशन (लूसली कपल्ड) में नौसंचालन स्थिति के आकलन में जुडे हुए हैं।