English
English हिन्दी
हिन्दी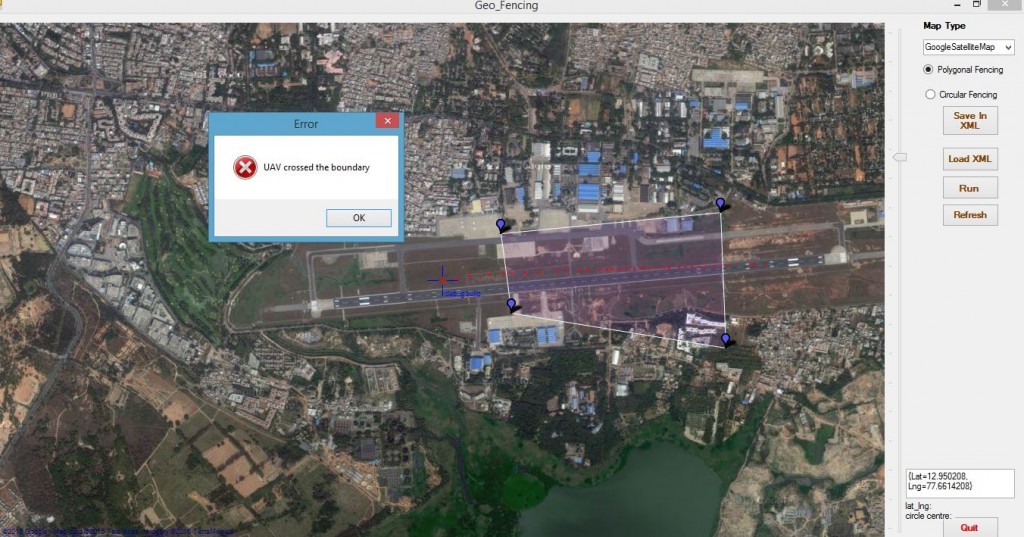
Geo-fencing and tagging
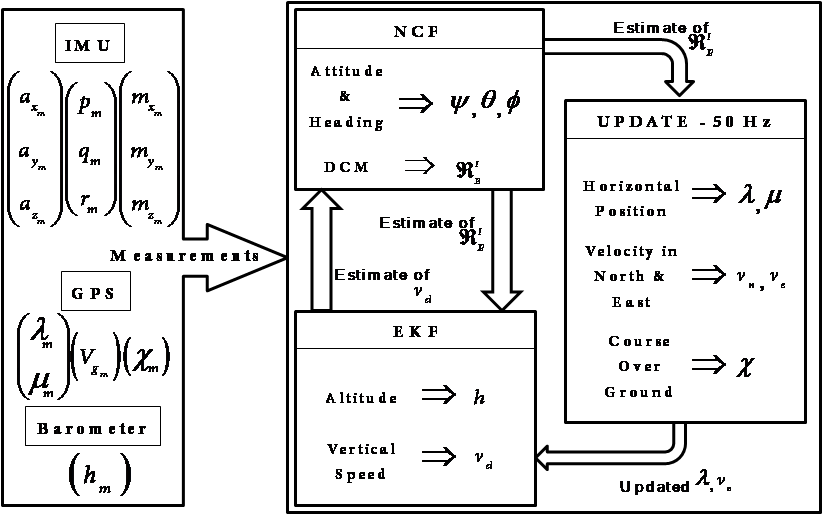
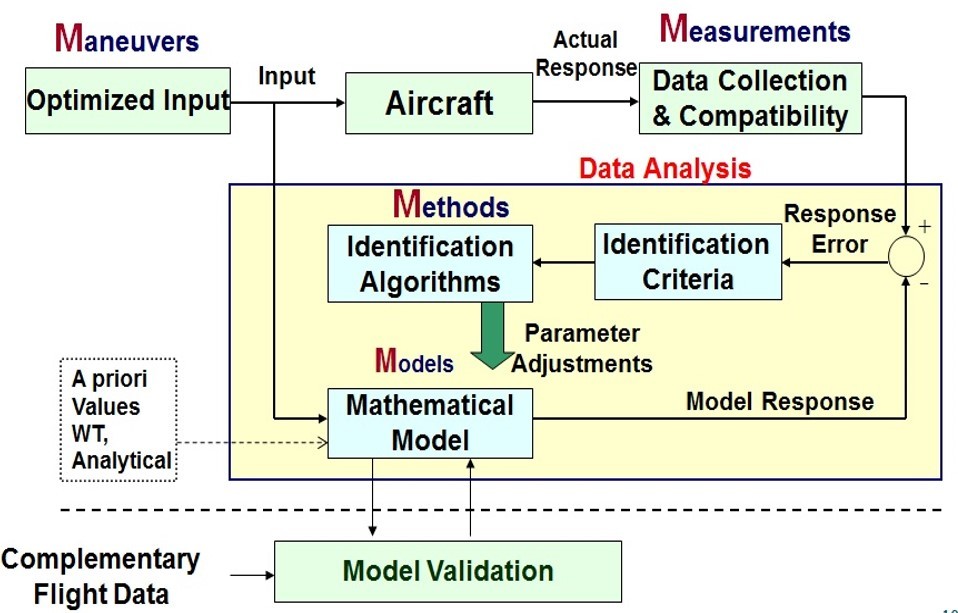
Geo-location technique is developed in order to determine the location of the target geological coordinates from the image captured from the UAV onboard camera. Target Geo-location was determined with the help of camera parameters, position and attitude of UAV and some coordinates transformations. Camera parameters can be obtained from calibration process i.e., extraction of intrinsic and extrinsic parameters of a camera. Geo-fencing was added feature to the GCS for increasing the level of security. In Geo-fencing, the boundary can be drawn either in polygonal or circular depends on the users choice of interest. If UAV crosses the boundary then a warning message along with an alarm alerts the user.
Specifications
Facilities where this techniques is used
Maor mile stones / results of this technique
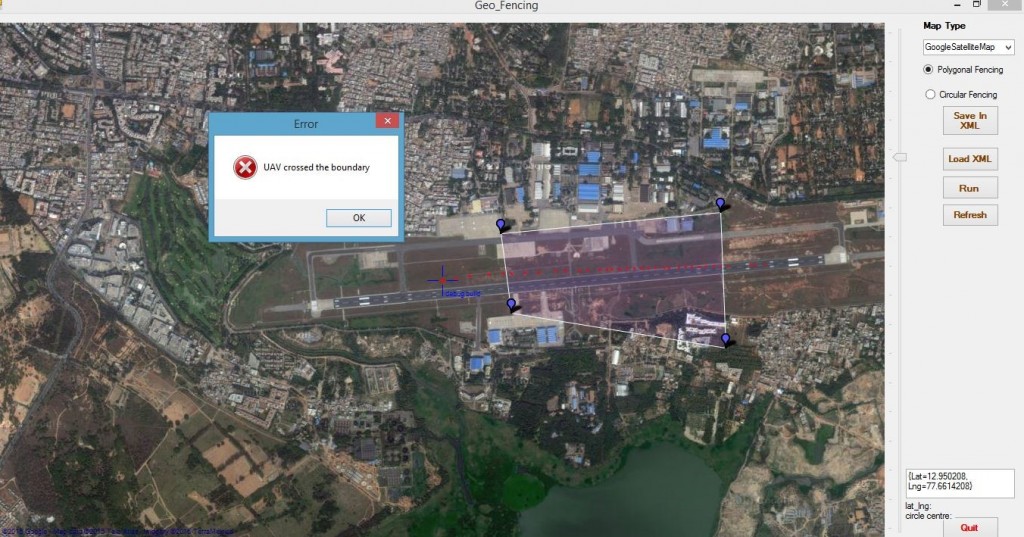
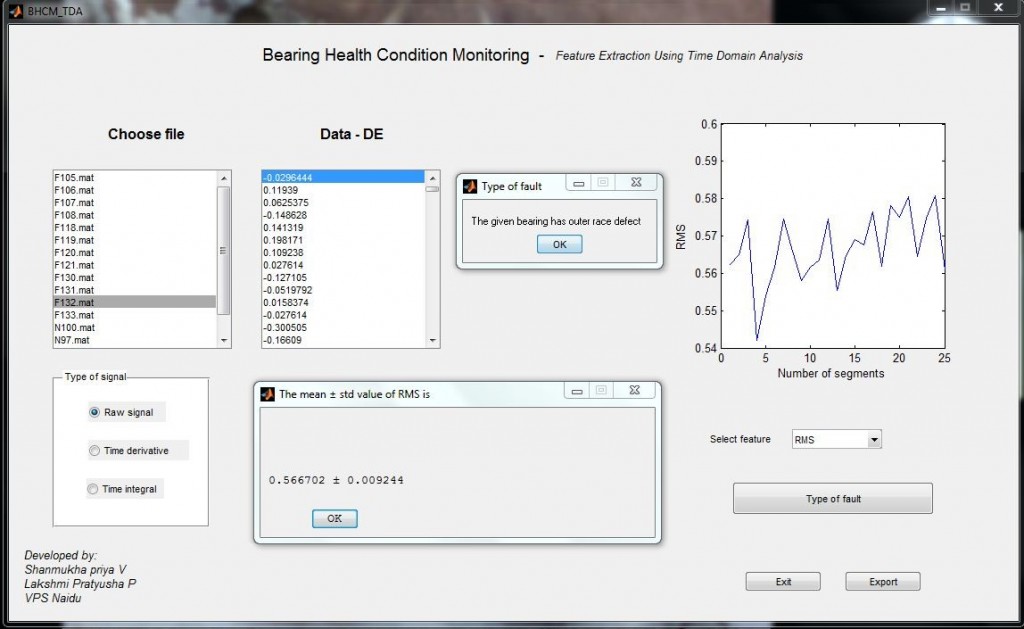
Fig: The simulated data (UAV position) crosses the boundary of polygon
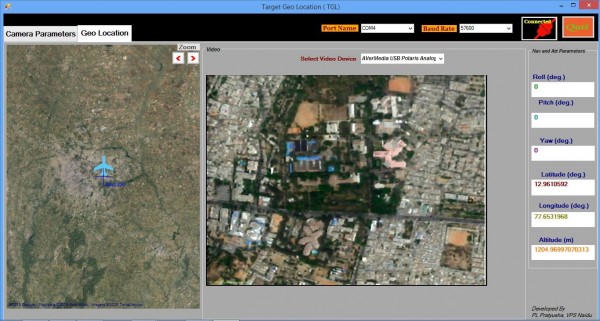
Fig: GUI displays video data as well as navigation data