English
English हिन्दी
हिन्दी
Sense and Avoid techniques for UAS
Unmanned Aerial Vehicle (UAV) has become a quiet a bit popular over the last 10 years because of its humongous growth in both military and commercial applications. Every UAV must possess sense & avoid capability so that it can be allowed by National Airspace System (NAS) to fly in space. It will have sensing mechanisms, obstacle-tracking, collision detection, and collision avoidance in sequence. Different approaches and potential solutions regarding the abovementioned four aspects have been developed and demonstrated on MAV.
Specifications
Facilities where this techniques is used
Major mile stones / results of this technique
Literature survey
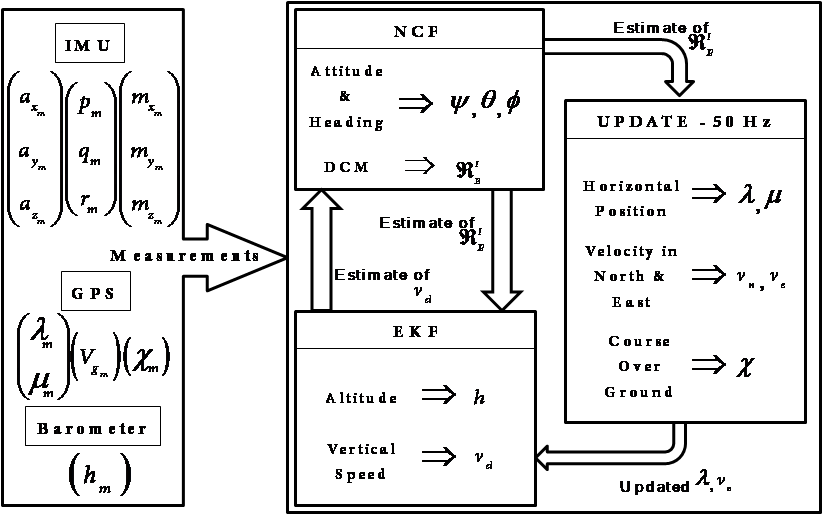
Selection of sensors
Sensor integration
Development of obstacle detection algorithms
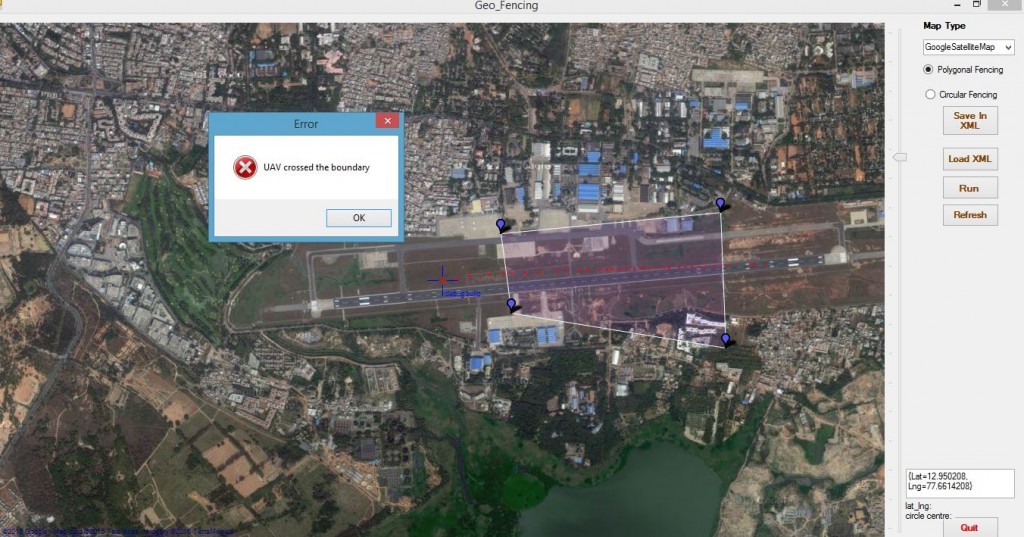
Development of collision avoidance algorithms
Integration on UAS
Experimentation and validation